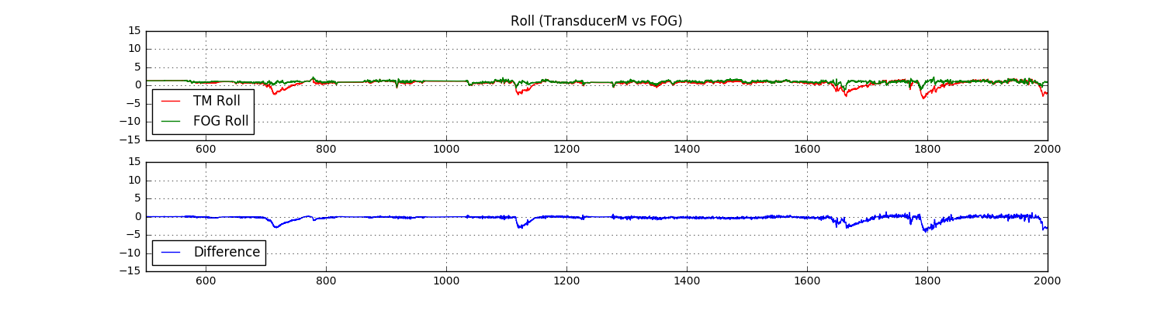
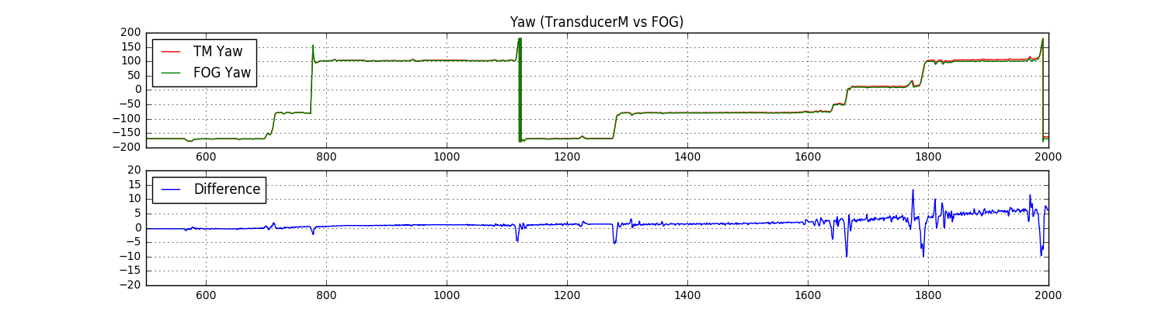
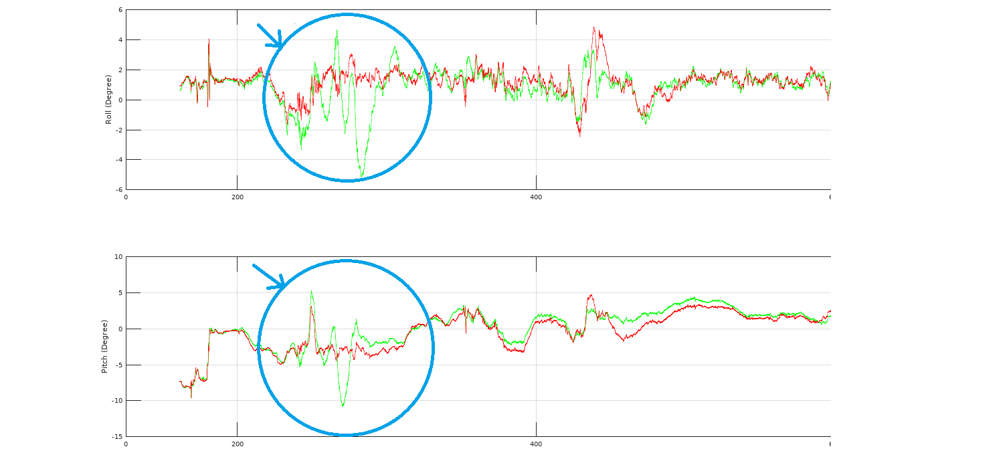
TransducerM Economy-Series in the city car driving test, with Fiber Optic Gyroscope (FOG) as a comparison, the relative error is calculated as follows (unit: degree).
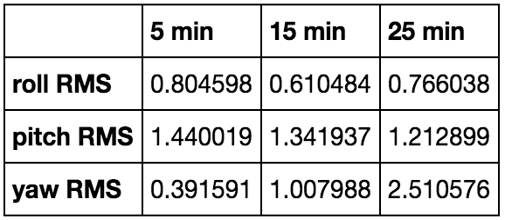
The performance demonstrated by TransducerM during the test shows a good result which also surpasses the rated performance of 2 degrees dynamic accuracy of roll and pitch and 4.6 degrees of yaw accuracy from its datasheet. The RMS value of the yaw angle of the TransducerM accumulates over time, which matches the normal behavior of a MEMS gyro when no GPS heading reference is available. The difference of Yaw angle between TransducerM and FOG shows some obvious jitter during the last 200 seconds due to the drifting of the time stamp between these two different systems, which can be corrected under real application using some synchronization technics and under which circumstance the TransducerM should have an even smaller (better) RMS value for the yaw accuracy.
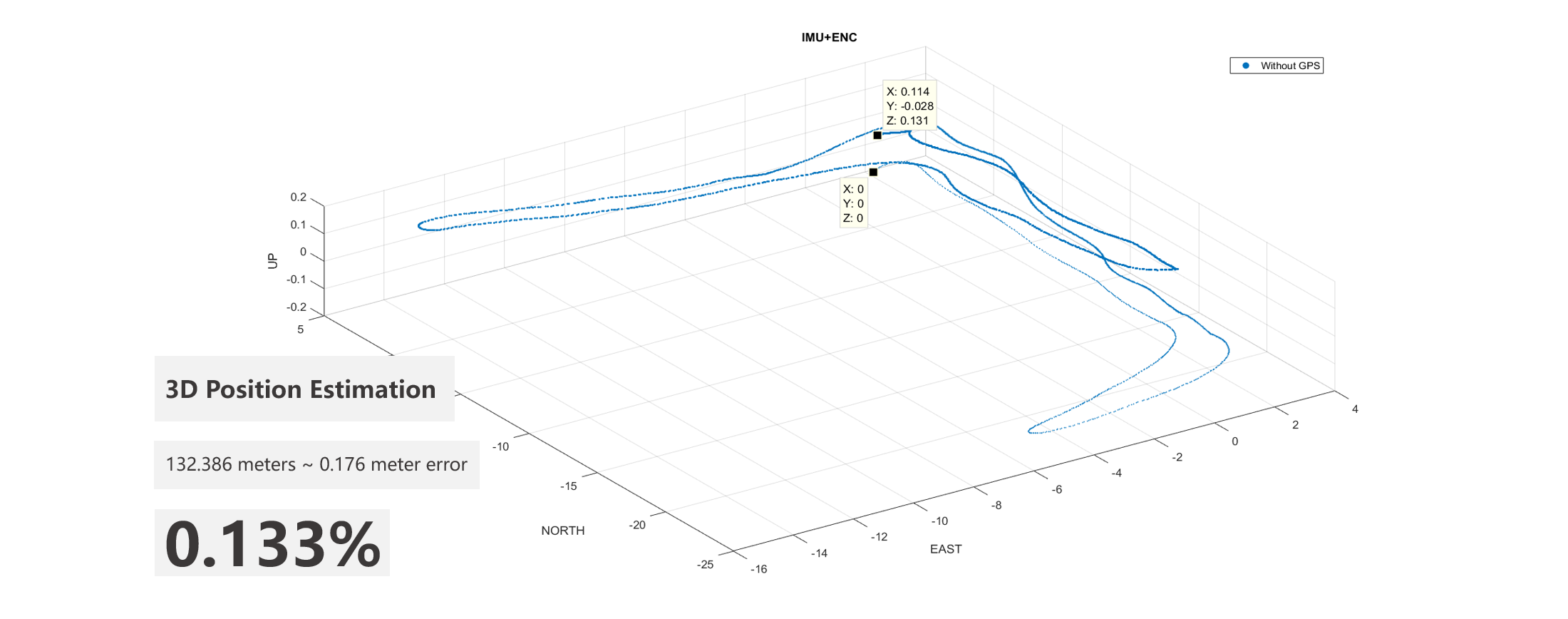
Positioning