

Typical Performance
PERFORMANCE
|
ROLL
|
PITCH
|
YAW
|
NOTES
|
Resolution
|
0.01°
|
0.01°
|
0.01°
|
|
Angle range
|
±180°
|
±90°
|
0 ~ 360°
|
|
Static accuracy
|
<0.7°
|
<0.7°
|
<2.0°
|
RMS1
|
Dynamic accuracy (inertial) |
<2.5°
|
<2.5°
|
≤ 2.0°/min
|
RMS1,2
|
Repeatability (inertial) |
<0.5°
|
< 0.5°
|
<0.5°
|
Absolute maximum1
|
Positional drift (inertial) |
< 0.2 °/h
|
< 0.2 °/h
|
10.0 °/h
|
Static condition1
|
Turn-on bias
|
< 0.5°
|
< 0.5°
|
< 2.0°
|
|
1. According to test results in laboratory environment under test conditions. 2. Including error introduced by communication latency at 115200 bps. |
||||
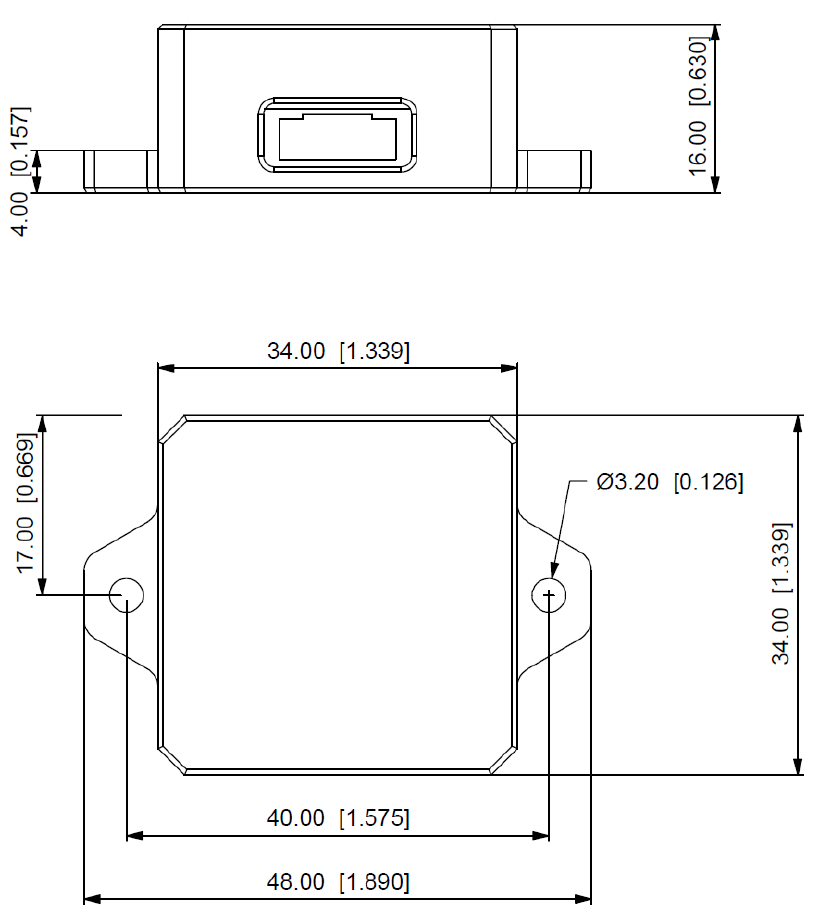
COMPACT PACKAGE WITH
- 34 x 34 x 16 mm
- Mechanical drawing. Unit: mm [inch], Mounting holes: M3.
DIGITAL INTERFACE
- UART (TTL Serial Port)
DYNAMIC PERFORMANCE
- Output Rate 200Hz Typ.
The motion sensing module takes the advantages of a unique processing method developed by SYD Dynamics. It offers great dynamic performance while keeping the preciseness.
*Specifications are subject to change without notice.